# MuJoCo
MuJoCo(Multi-Joint dynamics with Contact)是一个物理模拟器,可以用于机器人控制优化等研究。安装见[Mac安装MuJoCo以及mujoco_py](https://blog.csdn.net/JohnJim0/article/details/115656392?spm=1001.2014.3001.5501)
## HalfCheetah-v2
该环境基于mujoco仿真引擎,该环境的目的是使一只两只脚的“猎豹”跑得越快越好(下面图谷歌HalfCheetah-v2的,https://gym.openai.com/envs/HalfCheetah-v2/)。
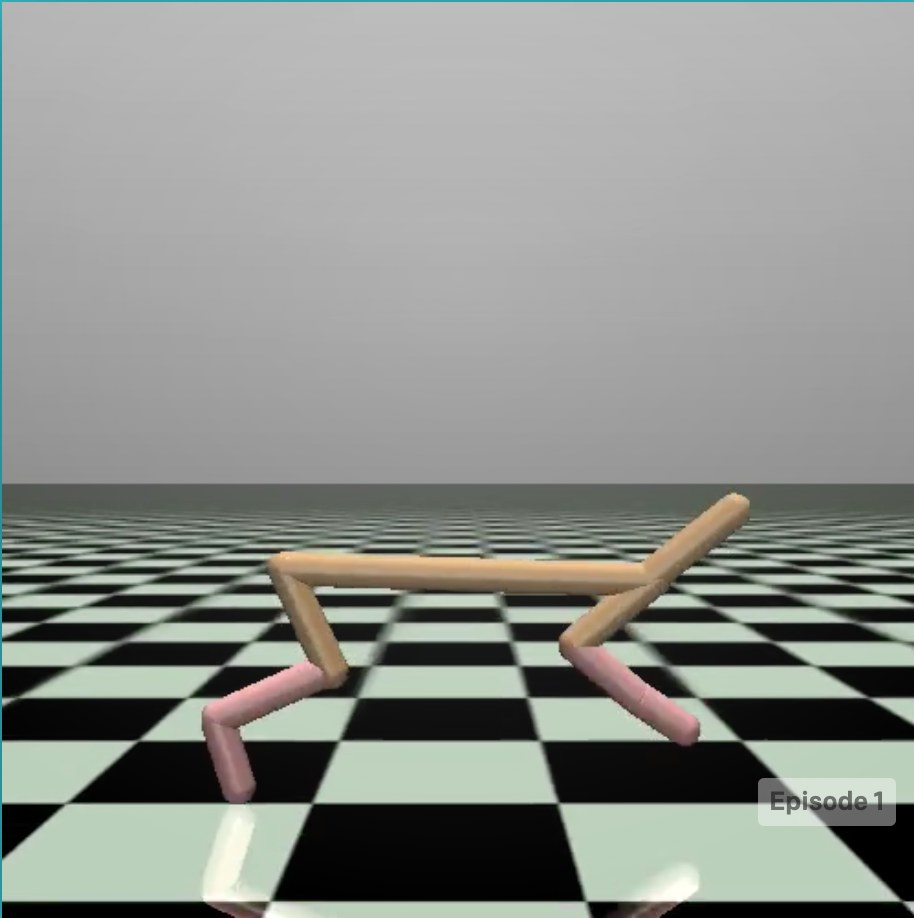 动作空间:Box(6,),一只脚需要控制三个关节一共6个关节,每个关节的运动范围为[-1, 1]。
状态空间:Box(17, ),包含各种状态,每个值的范围为,主要描述“猎豹”本身的姿态等信息。
回报定义:每一步的回报与这一步的中猎豹的速度和猎豹行动的消耗有关,定义回报的代码如下。
```python
def step(self, action):
xposbefore = self.sim.data.qpos[0]
self.do_simulation(action, self.frame_skip)
xposafter = self.sim.data.qpos[0]
ob = self._get_obs()
reward_ctrl = - 0.1 * np.square(action).sum()
reward_run = (xposafter - xposbefore)/self.dt
# =========== reward ===========
reward = reward_ctrl + reward_run
# =========== reward ===========
done = False
return ob, reward, done, dict(reward_run=reward_run, reward_ctrl=reward_ctrl)
```
当猎豹无法控制平衡而倒下时,一个回合(episode)结束。
但是这个环境有一些问题,目前经过搜索并不知道一个回合的reward上限,实验中训练好的episode能跑出平台之外:
动作空间:Box(6,),一只脚需要控制三个关节一共6个关节,每个关节的运动范围为[-1, 1]。
状态空间:Box(17, ),包含各种状态,每个值的范围为,主要描述“猎豹”本身的姿态等信息。
回报定义:每一步的回报与这一步的中猎豹的速度和猎豹行动的消耗有关,定义回报的代码如下。
```python
def step(self, action):
xposbefore = self.sim.data.qpos[0]
self.do_simulation(action, self.frame_skip)
xposafter = self.sim.data.qpos[0]
ob = self._get_obs()
reward_ctrl = - 0.1 * np.square(action).sum()
reward_run = (xposafter - xposbefore)/self.dt
# =========== reward ===========
reward = reward_ctrl + reward_run
# =========== reward ===========
done = False
return ob, reward, done, dict(reward_run=reward_run, reward_ctrl=reward_ctrl)
```
当猎豹无法控制平衡而倒下时,一个回合(episode)结束。
但是这个环境有一些问题,目前经过搜索并不知道一个回合的reward上限,实验中训练好的episode能跑出平台之外:
 加上时间有限,所以训练中reward一直处于一个平缓上升的状态,本人猜测这可能是gym的一个bug。
加上时间有限,所以训练中reward一直处于一个平缓上升的状态,本人猜测这可能是gym的一个bug。