# OpenAi Gym 环境说明
## 基础控制
### [CartPole v0](https://github.com/openai/gym/wiki/CartPole-v0)
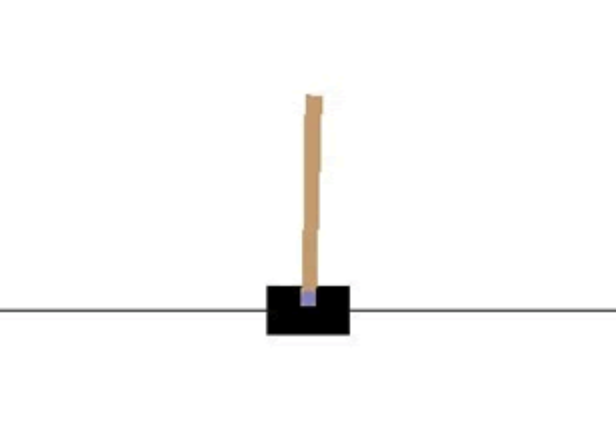 通过向左或向右推车能够实现平衡,所以动作空间由两个动作组成。每进行一个step就会给一个reward,如果无法保持平衡那么done等于true,本次episode失败。理想状态下,每个episode至少能进行200个step,也就是说每个episode的reward总和至少为200,step数目至少为200
### CartPole-v1
```CartPole v1```环境其实跟```CartPole v0```是一模一样的,区别在于每回合最大步数(max_episode_steps)以及奖励阈值(reward_threshold),如下是相关源码:
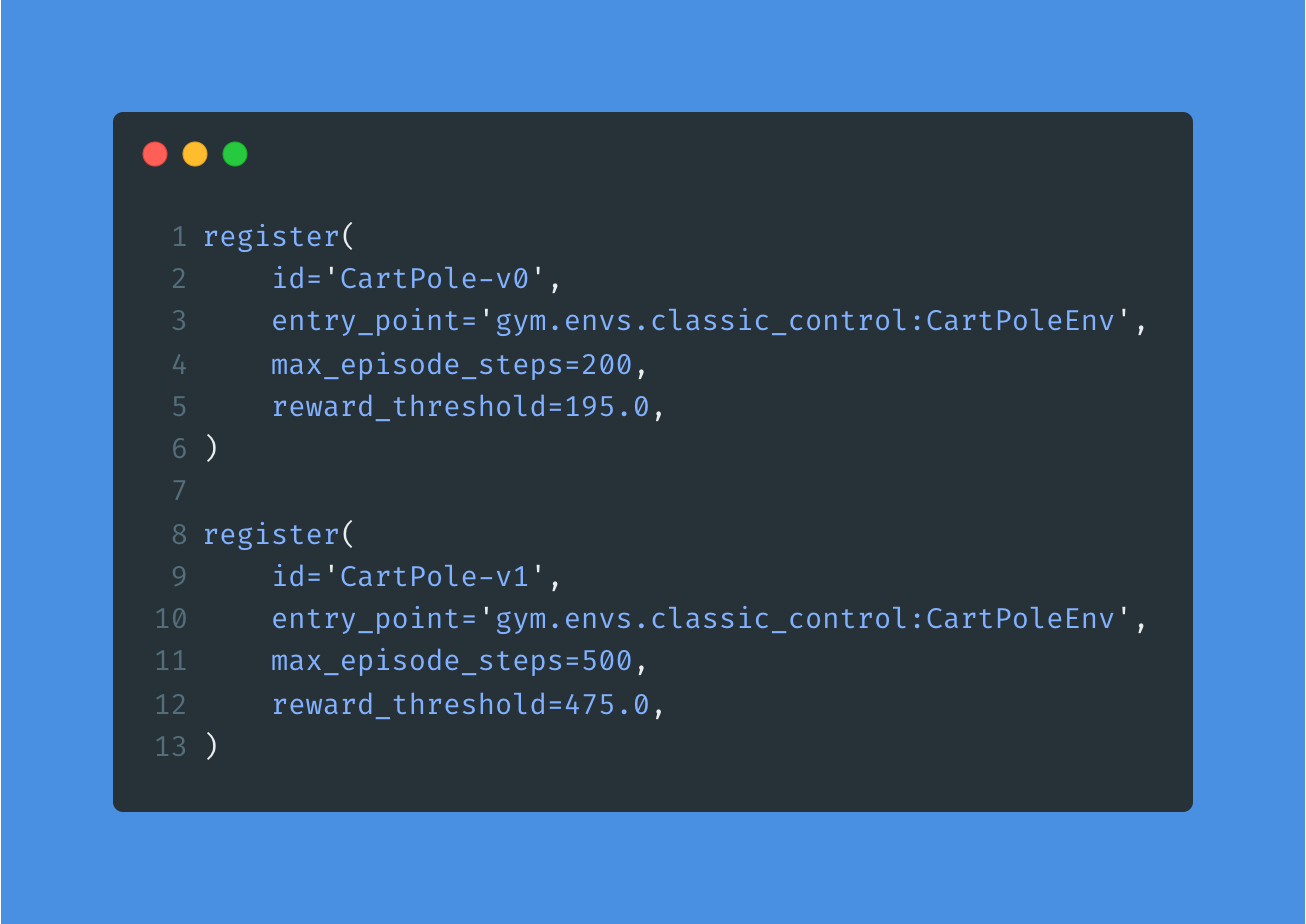
这里先解释一下奖励阈值(reward_threshold),即Gym设置的一个合格标准,比如对于```CartPole v0```如果算法能够将奖励收敛到195以上,说明该算法合格。但实际上```CartPole v0```的每回合最大步数(max_episode_steps)是200,每步的奖励最大是1,也就是每回合最大奖励是200,比Gym设置的奖励阈值高。笔者猜测这是Gym可能是给算法学习者们设置的一个参考线,而实际中在写算法时并不会用到这个算法阈值,所以可以忽略。
再看每回合最大步数,可以看到```CartPole v1```的步数更长,相应的奖励要求更高,可以理解为```v1```是```v0```的难度升级版。
### [Pendulum-v0](https://github.com/openai/gym/wiki/Pendulum-v0)
注:gym 0.18.0之后版本中Pendulum-v0已经改为Pendulum-v1
通过向左或向右推车能够实现平衡,所以动作空间由两个动作组成。每进行一个step就会给一个reward,如果无法保持平衡那么done等于true,本次episode失败。理想状态下,每个episode至少能进行200个step,也就是说每个episode的reward总和至少为200,step数目至少为200
### CartPole-v1
```CartPole v1```环境其实跟```CartPole v0```是一模一样的,区别在于每回合最大步数(max_episode_steps)以及奖励阈值(reward_threshold),如下是相关源码:

这里先解释一下奖励阈值(reward_threshold),即Gym设置的一个合格标准,比如对于```CartPole v0```如果算法能够将奖励收敛到195以上,说明该算法合格。但实际上```CartPole v0```的每回合最大步数(max_episode_steps)是200,每步的奖励最大是1,也就是每回合最大奖励是200,比Gym设置的奖励阈值高。笔者猜测这是Gym可能是给算法学习者们设置的一个参考线,而实际中在写算法时并不会用到这个算法阈值,所以可以忽略。
再看每回合最大步数,可以看到```CartPole v1```的步数更长,相应的奖励要求更高,可以理解为```v1```是```v0```的难度升级版。
### [Pendulum-v0](https://github.com/openai/gym/wiki/Pendulum-v0)
注:gym 0.18.0之后版本中Pendulum-v0已经改为Pendulum-v1
 钟摆以随机位置开始,目标是将其摆动,使其保持向上直立。动作空间是连续的,值的区间为[-2,2]。每个step给的reward最低为-16.27,最高为0。目前最好的成绩是100个episode的reward之和为-123.11 ± 6.86。
###
悬崖寻路问题(CliffWalking)是指在一个4 x 12的网格中,智能体以网格的左下角位置为起点,以网格的下角位置为终点,目标是移动智能体到达终点位置,智能体每次可以在上、下、左、右这4个方向中移动一步,每移动一步会得到-1单位的奖励。
钟摆以随机位置开始,目标是将其摆动,使其保持向上直立。动作空间是连续的,值的区间为[-2,2]。每个step给的reward最低为-16.27,最高为0。目前最好的成绩是100个episode的reward之和为-123.11 ± 6.86。
###
悬崖寻路问题(CliffWalking)是指在一个4 x 12的网格中,智能体以网格的左下角位置为起点,以网格的下角位置为终点,目标是移动智能体到达终点位置,智能体每次可以在上、下、左、右这4个方向中移动一步,每移动一步会得到-1单位的奖励。
 如图,红色部分表示悬崖,数字代表智能体能够观测到的位置信息,即observation,总共会有0-47等48个不同的值,智能体再移动中会有以下限制:
* 智能体不能移出网格,如果智能体想执行某个动作移出网格,那么这一步智能体不会移动,但是这个操作依然会得到-1单位的奖励
* 如果智能体“掉入悬崖” ,会立即回到起点位置,并得到-100单位的奖励
* 当智能体移动到终点时,该回合结束,该回合总奖励为各步奖励之和
实际的仿真界面如下:
如图,红色部分表示悬崖,数字代表智能体能够观测到的位置信息,即observation,总共会有0-47等48个不同的值,智能体再移动中会有以下限制:
* 智能体不能移出网格,如果智能体想执行某个动作移出网格,那么这一步智能体不会移动,但是这个操作依然会得到-1单位的奖励
* 如果智能体“掉入悬崖” ,会立即回到起点位置,并得到-100单位的奖励
* 当智能体移动到终点时,该回合结束,该回合总奖励为各步奖励之和
实际的仿真界面如下:
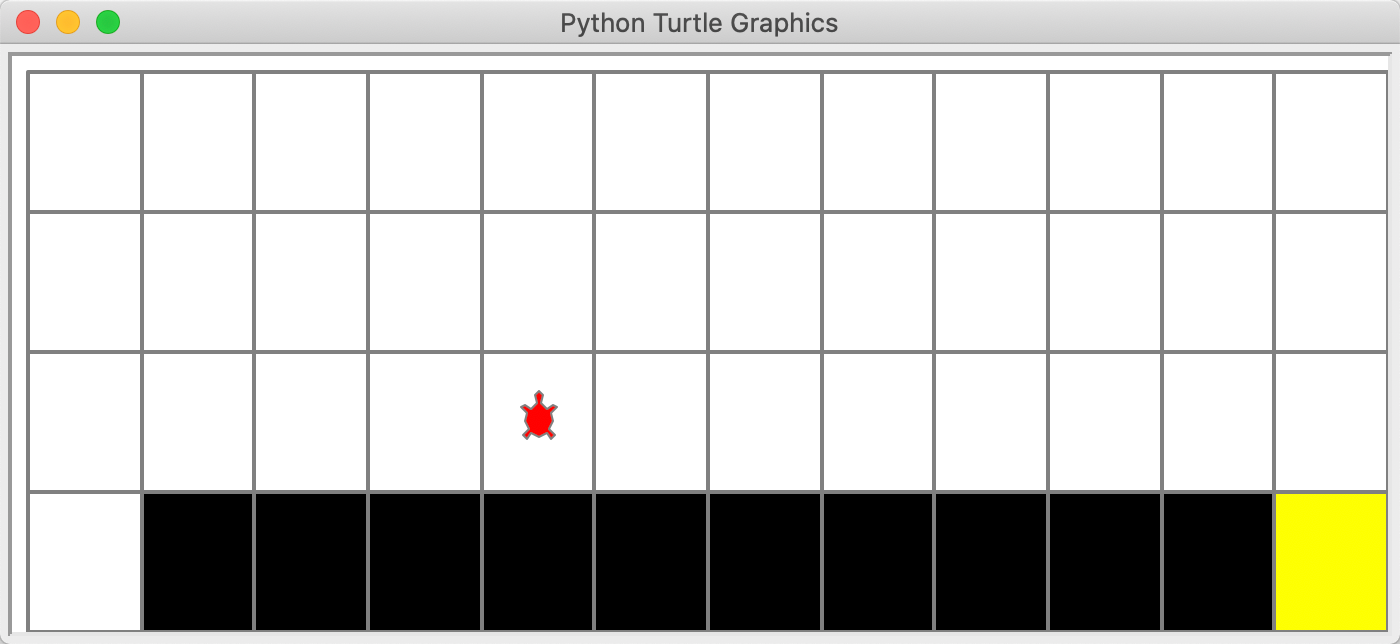 由于从起点到终点最少需要13步,每步得到-1的reward,因此最佳训练算法下,每个episode下reward总和应该为-13。
## 参考
[Gym环境相关源码](https://github.com/openai/gym/tree/master/gym/envs)
由于从起点到终点最少需要13步,每步得到-1的reward,因此最佳训练算法下,每个episode下reward总和应该为-13。
## 参考
[Gym环境相关源码](https://github.com/openai/gym/tree/master/gym/envs)