# Deep Recurrent Q-Learning for Partially Observable MDPs(部分可观测马尔可夫决策过程的深度循环Q学习)
作者:Matthew Hausknecht,Peter Stone
单位:Department of Computer Science The University of Texas at Austin
论文发表会议:National conference on artificial intelligence
论文发表时间:Submitted on 23 Jul 2015, last revised 11 Jan 2017
论文查看网址:https://arxiv.org/abs/1507.06527
论文贡献:提出一种基于DQN的神经网络模型(DRQN),将包含卷积神经网络(CNN)的DQN模型和LSTM结合,使强化学习智能体拥有记忆力的特性。
## 一. 写作动机
**Why:**
在 *Playing Atari with Deep Reinforcement Learning(Mnih et al., 2013)* 中,DQN是使用智能体(Agent)遇到的包含当前状态的最后4个状态的组成(最后4个画面)作为**输入**。**目的**是获得画面中物体/角色的**方向**、**速度**等信息。但换句话说,倘若遇到需要记忆特征超过四个画面的时间跨度任务时,对于DQN来说,则会由马尔可夫决策过程(MDP)变成部分可观测的马尔可夫决策过程(POMDP)。
**What:**
部分可观测的马尔可夫决策过程(Partially-Observable Markov Decision Process, POMDP)是指:当前观测(Observation,obs)的不完整且带有噪音,不包含环境运作的所有状态。导致无法作为环境(Environment,env)的完整描述信息(智能体得到观测跟环境的状态不等价)。
**How:**
论文作者提出,为避免因部分可观测的马尔可夫决策过程(POMDP)导致DQN在任务环境学习的过程中出现性能下降,引入**Deep Recurrent Q-Network (DRQN)**,是基于LSTM(Long Short-Term Memory,LSTM)和DQN的组合。并**证明使用DRQN能有效处理部分可观测的马尔可夫决策过程(POMDP)**,当评估智能体时,输入智能体的观测(obs)发生变化(遮盖、画面闪烁)时,因参数化价值函数(Value function)包含循环神经网络层(LSTM)能够使学习到的 策略$\pi_{\theta }$ 具有鲁棒性,不会发生策略崩塌。
## 二. 背景介绍
### 1. Deep Q-Learning(深度Q学习)
使用深度Q学习方法,是通过参数为$\theta$的深度神经网络来近似价值函数(Value Function)$V(s)$或动作价值函数(Action-Value Function)$Q(s,a)$来隐式的学习最优策略$\pi ^*$,输入环境的观测(obs),输出对观测(obs)估计的V值或Q值。
深度Q学习适用场景:连续状态空间(State space)离散动作空间(Action Space)任务。
价值函数的作用为:评估在当前状态-动作下,未来回报(Return)的期望。
使用深度神经网络作为强化学习的参数化值函数近似器的优点:
(1)具有深度学习自动提取特征的能力。
(2)参数化模型将现有可见的观测(obs)泛化到没有见过的观测(obs):$|\theta|\ll|S\times A|$
(3)参数化模型可通过求导数的形式来更新神经网络模型参数。
参数化价值函数为:
$$V_\theta (s)\cong V^\pi (s) \\ Q_\theta (s,a)\cong Q^\pi (s,a)$$
深度Q学习保持学习稳定的技巧(Trick):
(1)经验回放(Experience Replay):针对数据层面的相关性和数据分布变化做改进,使得数据尽可能满足独立同分布(i.d.d)属性。
(2)目标网络(Target Network):解决在时序差分(Timing Difference,TD)学习时,TD target和当前Q网络高度相关的问题。
深度Q学习的损失函数(Loss Function)为:
$$\mathcal{L}_{i}\left(\theta_{i}\right)=\mathbb{E}_{\left(s, a, r, s^{\prime}\right) \sim \mathcal{D}}\left[\left(y_{i}-Q\left(s, a ; \theta_{i}\right)\right)^{2}\right] \\
y_{i}=r+\gamma \max _{a^{\prime}} \hat{Q}\left(s^{\prime}, a^{\prime} ; \theta^{-}\right)
$$
深度Q学习的最优动作$a^*$为当前状态(state)下价值函数输出Q值最大对应的动作:
$$
a=arg\;\underset{a}{max} Q(s,a)
$$
### 2. Partial Observability(部分可观测)
马尔可夫决策过程(MDP)五元组(S,A,P,$\gamma$,R):
(1)S是状态的集合
(2)A是动作的集合
(3)$P(s'|s,a)$是环境的状态转移概率
(4)$\gamma \in [0,1]$是对未来累积奖励(回报 Return)的折扣因子
(5)R是奖励函数,R:S × A
部分可观测的马尔可夫决策过程(POMDP)七元组(S,A,P,$\gamma$,R,Ω,O):
(1)Ω是观测$(obs,o)$的集合, $o\in \Omega$
(2)O是观测函数,$O(s',a,o)= P(o | s',a)$
因为观测(obs)是对状态的部分描述,所以可能会遗漏一些信息。
$$Q(o, a \mid \theta) \neq Q(s, a \mid \theta)$$
论文作者通过实验证明,使用DRQN可以缩小价值函数对于观测(obs)的Q值与对状态(State)的Q值之间的差距。即智能体学习到的策略能在具有POMDP性质的任务环境中具有鲁棒性。
## 三. 模型架构
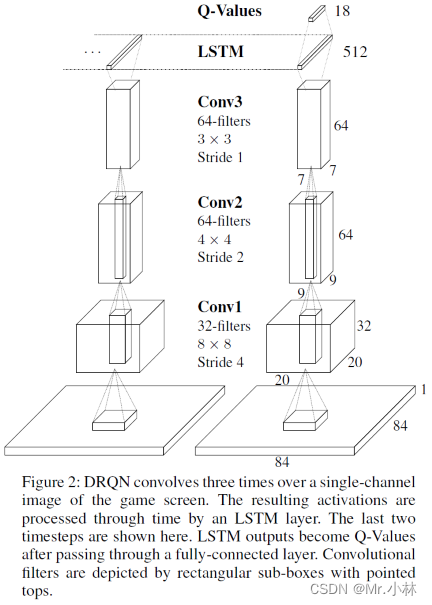
**模型输入**:Atari 游戏的84*84像素的单通道图像
**模型输出**:游戏对应18个离散动作的Q值
模型架构解释:
①首先使用3层卷积神经网络(Convolutional Neural Networks,CNN)提取图像特征。
②其次传入LSTM,获得游戏画面之间的序列特征。
③最后使用全连接层(Fully Connected Layers,FC)变成Q值。
## 四. 智能体更新方法
**Bootstrapped Random Updates**:从经验池(Replay Memory)中随机选择一个回合的轨迹$\tau$ ,并从该回合的经验片段中随机选择开始点沿时间步骤顺序更新模型。(以时序差分Timing Difference的方式更新)
$$\tau =\left \{ s_0, a_0, s_1, r_1, a_1, \cdots ,s_{t-1}, r_{t-1}, a_{t-1}, s_t, r_t\right \} $$
例如:选择从轨迹$\tau$的$s_2$进行顺序更新,直到轨迹$\tau$的终止状态$s_t$停止。
设计缺陷:使用随机更新方式符合DQN中随机采样经验的更新策略。但在本论文的价值函数设计中包含LSTM层。导致在每次训练更新开始时,**LSTM**会因为 **隐含状态$h_{t-1}$** 的输入为零,导致LSTM难以学习比时间序列反向传播到达的时间步骤更长的时间范围。
**LSTM**结构图:
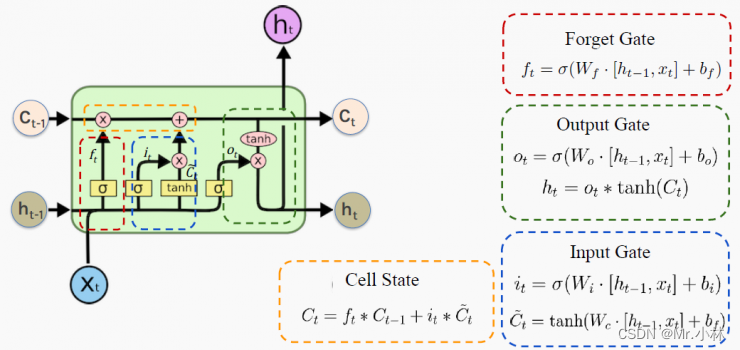
遗忘门(Forget Gate):控制哪些数据保留,哪些数据要遗忘。
输入门(Input Gate):控制网络输入数据流入记忆单元的多少。
输出门(Output Gate):扛着记忆但与对当前输出数据的影响,即记忆单元中的哪一部分会在时间步t输出。
细胞状态(Cell State):将旧的细胞状态更新为当前细胞状态,由遗忘门和输入门共同控制。
本文使用的智能体的更新方式均为**随机更新策略**。
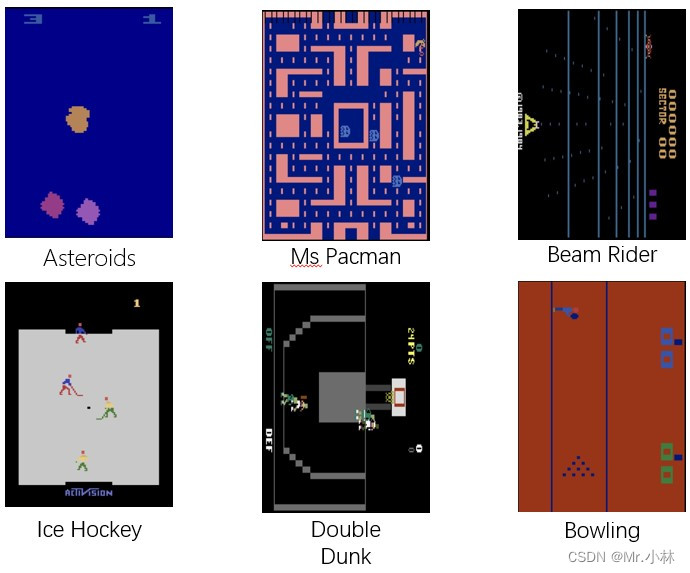
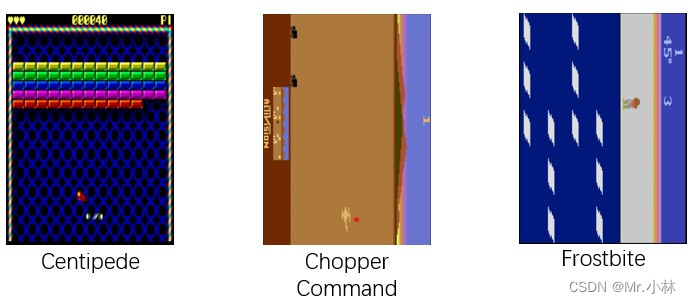
## 五. 任务环境
本文选择9个Atari 2600游戏任务环境进行评估基于DRQN神经网络模型的智能体(Agent)性能。
游戏环境示意图为:
|游戏环境 | 介绍 |
|--|--|
|Asteroids |具有自然闪烁的NPC,使其成为潜在的循环学习候选 |
| Ms Pacman | 通关类游戏,有闪烁的幽灵和强力药丸 |
|Frostbite|平台类游戏|
| Beam Rider | 射击类游戏 |
| Centipede | 射击类游戏 |
| Chopper Command | 射击类游戏 |
|Ice Hockey|体育比赛类|
|Double Dunk|体育比赛类|
|Bowling|体育比赛类|
- [Atari 2600在线游戏网页](https://www.free80sarcade.com/all2600games.php)
## 六. 损失函数与奖励函数
**损失函数**(Loss Function):论文作者主要提出基于DRQN的神经网络模型,没有对DQN的强化学习算法进行更改,仍然采用DQN的损失函数进行神经网络模型拟合(动作价值函数,Action-Value Function)。
$$\mathcal{L}_{i}\left(\theta_{i}\right)=\mathbb{E}_{\left(s, a, r, s^{\prime}\right) \sim \mathcal{D}}\left[\left(y_{i}-Q\left(s, a ; \theta_{i}\right)\right)^{2}\right] \\
y_{i}=r+\gamma \max _{a^{\prime}} \hat{Q}\left(s^{\prime}, a^{\prime} ; \theta^{-}\right)
$$
**奖励函数**(Reward Function):论文使用的任务环境为Atari 2600游戏环境,根据不同的游戏任务,环境都自带奖励函数,不需要额外定义。
## 七. 实验证明
### 1. Flickering Pong POMDP(闪烁的Pong,部分可观测马尔可夫决策过程)
DQN通过输入包含当前观测(obs)的最后四个画面来实现将部分可观测的马尔可夫决策过程(POMDP)转换成为马尔可夫决策过程(MDP)。
**实验目的**:而为了验证DRQN在具有POMDP性质的游戏环境中对连续的模糊输入具有鲁棒性。引入 **Flickering Pong POMDP** 对Pong游戏的修改。
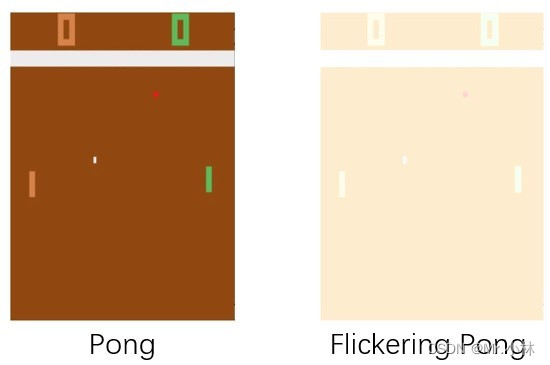
**实验设计**:在每个时间步长,游戏画面完全显示或完全模糊的概率 **$p=0.5$**。使用这种方式使 Flickering Pong 游戏环境 有一半的概率,画面被模糊化,使智能体得到观测(obs)具有POMDP性质。
为了验证 :
①DQN神经网络模型中卷积层(CNN)能够具有在模糊观测画面中检测物体移动 **速度、方向** 的能力,在Flickering Pong游戏环境中输入包含当前观测画面的最后10个画面到模型中,并以可视化方式确认。
②DRQN神经网络模型中LSTM层具有在模糊观测画面中检测物体历史特征,在Flickering Pong游戏环境中输入当前观测画面到模型中,并以可视化方式确认。
**实验baseline**:DQN神经网络模型(输入包含当前观测画面的**最后10个画面**)。
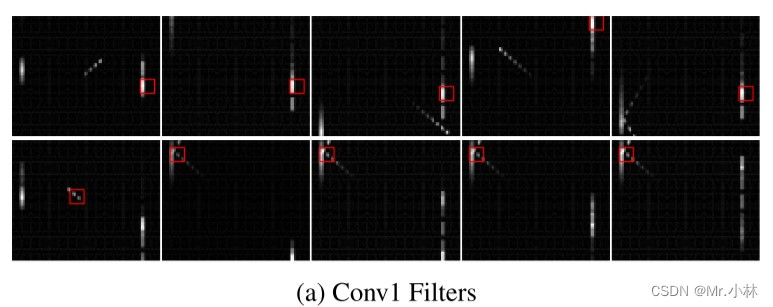
现象:在第一层卷积层中,滤波器主要检测到 Flickering Pong游戏环境 中的**球拍**。
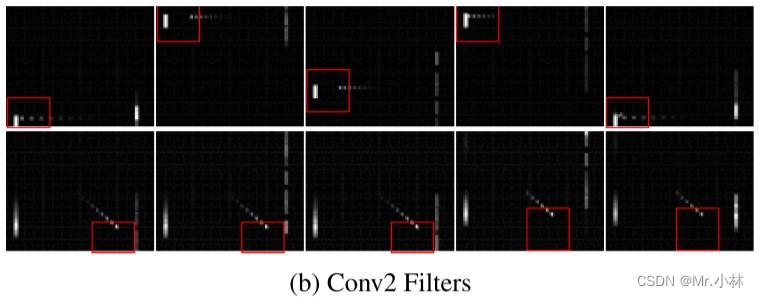
现象:在第二层卷积层中,滤波器开始检测到 Flickering Pong游戏环境 中的**球拍**以及**球**的运动方向,有的状态下滤波器也能同时检测到**球拍、球**。
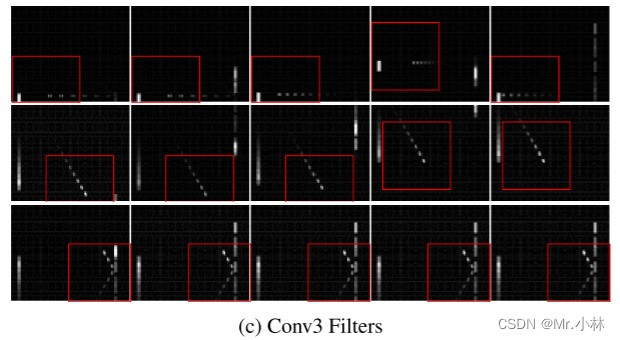
现象:在第三层卷积层中,滤波器都能检测到**球拍**和**球**的相互作用,有偏转、球的速度和移动方向。
**实验**:为了验证DRQN神经网络模型中LSTM层能够检测到画面与画面间的序列特征,在每个时间步内仅输入当前观测(obs)到的**1个画面**到DRQN模型中。
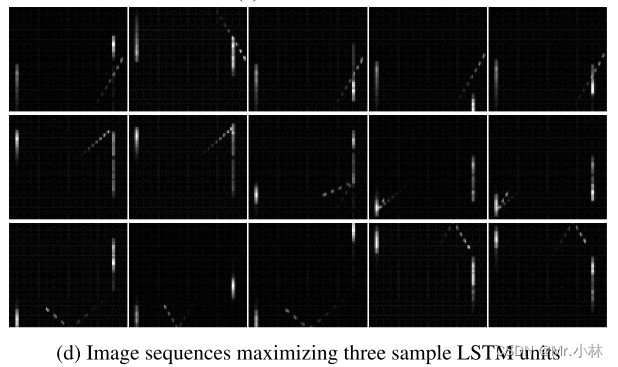
现象:LSTM层各单元能够透过具有闪烁的单个观测画面,检测到Flickering Pong游戏环境中的高级事件,例如**球从墙上反弹**等。
**实验结论**:通过 **输入10个连续观测画面到含有卷积层的DQN** 以及 **输入1个观测画面到含有LSTM层的DRQN** 进行对比,结果显示都能检测到游戏画面的历史特征。基于此,当任务环境具有POMDP性质时,上述两种方法都可供选择。证明**使用LSTM神经网络层,能够在具有时间序列特征的单个观测画面中整合序列特征**。
### 2. Evaluation on Standard Atari Games (标准的Atari游戏评估)
**实验目的**:为了对比论文作者提出的DRQN神经网络模型和基于卷积神经网络(CNN)的DQN神经网络模型在标准的Atari 2600游戏任务环境中的表现,使用9个不同的 Atari 2600 游戏环境进行综合评估。
**实验设计**:为了让任务符合MDP性质,设置输入为包含当前观测画面的最后4个画面。并使用 **独立 t 检验** 计算得分的统计显著性,显著性水平$P=0.05$
**实验baseline**:基于卷积神经网络(CNN)的DQN神经网络模型在9个标准的Atari 2600游戏任务环境中的表现。
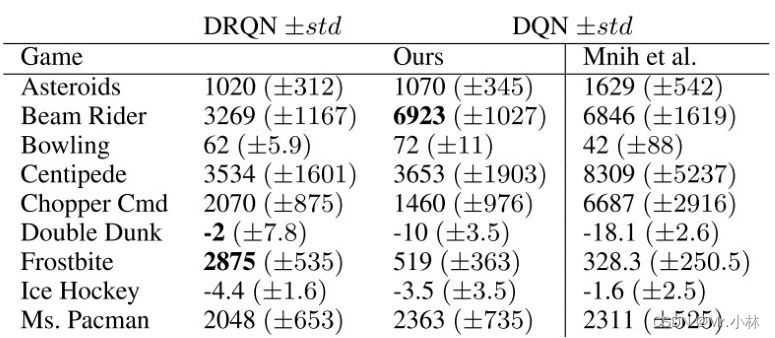
**实验结论1**:在9个不同的游戏任务环境中,基于DRQN神经网络模型的智能体得分在5个环境上的表现优于基于DQN神经网络模型的智能体。
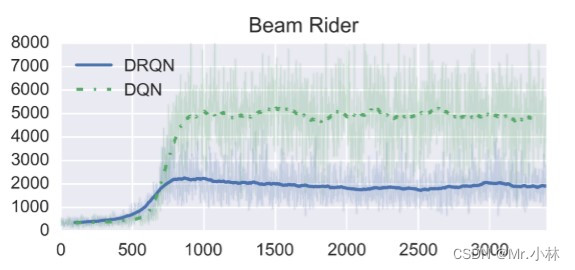
**实验结论2**:DRQN在Beam Rider游戏中表现相比DQN明显更差。
*个人分析* :可能是Beam Rider游戏中的**决策依据**并不需要时间跨度太久远的观测画面特征,主要依于当前即时观测画面的特征。加入的LSTM层反而导入过多不必要的特征造成智能体决策上的干扰。
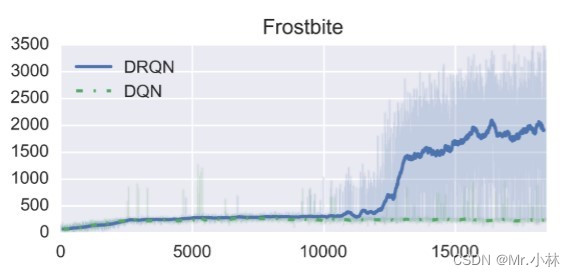
**实验结论3**:DRQN在 Frostbite游戏 中表现最好。游戏的任务是要求玩家跳过所有四排移动的冰山并返回屏幕顶部。多次穿越冰山后,已经收集到足够的冰块,可以在屏幕右上角建造一个冰屋。随后玩家可以进入冰屋进入下一关。
*个人分析*: Frostbite游戏任务 具有长时间跨度决策性质,因此DRQN的LSTM层能够学习到具有长时间跨度的特征,智能体决策上的依据能够超越输入模型的4个观测画面所具有的特征。
### 3. MDP to POMDP Generalization(MDP到POMDP的泛化性)
**实验目的**:为了评估使用基于DRQN模型的智能体在标准的MDP(输入为包含当前观测画面的最后4个画面)上训练得到的策略$\pi$,在推广到POMDP性质的相同游戏任务环境时,智能体的策略$\pi$能否保持有效性?
**实验设计**:选择用实验2的9个Atari 2600游戏任务环境进行闪烁(Flickering)设置,在每个时间步长,游戏画面完全显示的概率$p$按照0.1~0.9的概率依次使用训练好的智能体进行实验。
**实验baseline**:基于卷积神经网络(CNN)的DQN神经网络模型在POMDP性质的Atari 2600 游戏任务环境中的百分比原始分数(Percentage Original Score)。
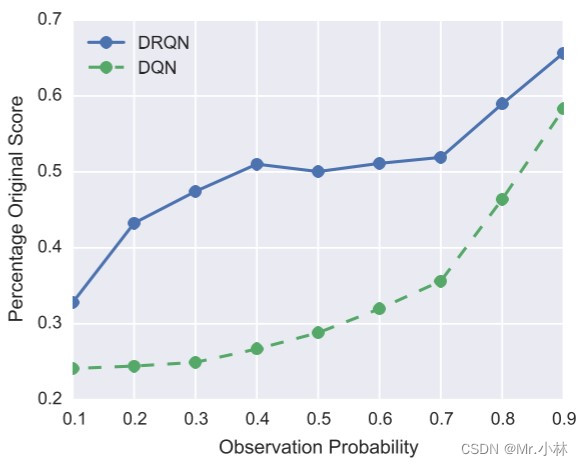
**实验结论**:在标准的MDP训练的基于DRQN模型的智能体和基于DQN模型的智能体,分别在闪烁(Flickering)设置的游戏环境中进行评估,通过折线图观察到,基于DRQN模型的智能体性能下降的幅度相比基于DQN模型的智能体更小。
$$Percentage\,Original\,Score=\frac{ {\textstyle \sum_{i=1}^{9}}POMDP\,Score }{ {\textstyle \sum_{i=1}^{9}}MDP\,Score } \\
i\ is\ the\ number\ of\ game\ environments$$
## 八. 相关工作
### 1. LSTM在解决具有POMDP性质的任务上相比于RNN的优越性
在 *Reinforcement learning with long shortterm memory(Bakker et al., 2001)* 这篇论文中,在具有POMDP性质的Corridor和Cartpole环境上,使用LSTM神经网络作为强化学习中的 优势函数(Advantage Function)近似,相比于使用RNN神经网络能够更好的完成任务。虽然Corridor和Cartpole环境的状态空间特征数量以及动作空间,相比于Atari 2600 游戏环境都很少!
### 2. LSTM在解决具有POMDP性质的任务框架
在 *Solving deep memory POMDPs with recurrent policy gradients(Wierstra et al., 2007)* 这篇论文首先使用策略梯度(Policy Gradient)结合LSTM神经网络解决具有POMDP性质的问题。但模型在特征提取上属于手工设计的特征,并没有结合深度神经网络模型做到自动提取特征。
## 九. 结论
1. 基于DRQN模型的智能体在 POMDP性质的 Atari 2600 游戏环境下处理观测(obs)时,能够利用单个观测画面的输入,达到与基于DQN模型的智能体在输入连续10个观测画面得到的历史特征相同。即使用基于DRQN模型能够降低计算复杂度。
2. 根据 标准的 Atari 2600 游戏环境的任务属性不同,在需要接收长时间跨度特征的任务中(例如 Frostbite 游戏),基于DRQN模型的智能体的表现会远超于基于DQN模型的智能体。
3. 基于DRQN模型的智能体在相同的 Atari 2600 游戏环境下遇到出现POMDP的情况下,其泛化性会比基于DRQN模型的智能体好。
## 十. 贡献
本文通过实验证明,加入 **LSTM神经网络** 的DRQN模型的智能体,面对具有POMDP性质的问题上,其性能表现优于DQN。但在实践过程中,仍需以任务的实际情况而定。通用性不高,并无法带来系统性的提升。
## 十一. 下一步的工作
### 1. 强化学习算法层面
在连续状态空间、离散动作空间的任务中,有结合**Double DQN**和**Dueling DQN**的**D3QN算法**。可以在本论文提出的DRQN神经网络模型架构上,使用D3QN强化学习算法来进行实验,观察智能体在本次论文的实验中表现不好的任务环境(例如 Beam Rider 游戏)是否能够得到性能上的提高,并达到系统性的提升。
### 2. 任务环境层面
在强化学习机器控制领域上的任务情境中,智能体不仅需要对环境输出的观测(obs)学习时间序列特征,还需要将智能体本身输出的动作(Action)纳入成为观测的一部分进行学习。期待之后智能体训练好的 **策略$\pi$** 既能够对环境输出的观测进行考量,也能将历史动作纳入考虑的范围,以输出连贯合理的决策动作。
### 3. 深度神经网络模型层面
随着自注意力机制为核心的Transformer神经网络模型的出现,Transformer抛弃传统的CNN和RNN,只使用注意力机制(Attention)。同时Vision Transformer的出现打破了NLP领域和CV领域的边界,以Transformer为代表的决策模型成为当前RL领域的新范式。
那么是否在同样是以图像作为观测的 Atari 2600 游戏任务环境上,以DQN算法为基础,使用 **基于Vision Transformer模型** 拟合价值函数,来隐式的学习策略$\pi$,以期望在智能体能够达到更好的性能!
## 参考文献
1. Volodymyr Mnih, J. et al. 2013. Playing Atari with Deep Reinforcement Learning.
2. Wierstra, D.; Foerster, A.; Peters, J.; and Schmidthuber, J. 2007. Solving deep memory POMDPs with recurrent policy gradients.
3. Bakker, B. 2001. Reinforcement learning with long shortterm memory. In NIPS, 1475–1482. MIT Press.
4. [推荐中的序列化建模:Session-based neural recommendation](https://zhuanlan.zhihu.com/p/30720579)
5. [论文十问-快速理解论文主旨的框架](https://www.cnblogs.com/xuyaowen/p/raad-paper.html)
6. [RLChina 2022 强化学习暑期课](http://rlchina.org/topic/491)
7. [蘑菇书EasyRL](https://github.com/datawhalechina/easy-rl)
====================================
作者:林俊杰
研究单位:台湾成功大学制造资讯与系统研究所
研究方向:强化学习、深度学习
联系邮箱:554317150@qq.com